例举雷达设置的两个致命错误
发布时间:2019-10-24 17:35:28 访问次数:4351摘要:
1.港口回转空间之扩充常常赶不上船舶巨大化的发展,于狭窄水域操船,远较小船时代风险急速增大,引水人于狭窄水域操船实需航仪辅助降低风险。
2.航仪设定疏失发生较大误差,将产生严重意外事故。
3.对于设定雷达VRM以及Ship Contour时,有没有较大之误差,检视方法。
4.对于没有慎重调校之航仪或者设备,过度依赖(Over Reliance)将可能产生严重之操船意外,特应引以为戒。
本文:
小船时代,能见度良好情况下,港内运转,领港几乎全凭目视,根本不须用到雷达辅助。
可是现在的大货柜船,长度动辄超过300米,艏艉盲距超过300米者比比皆是,由于港口回转空间之扩充常常赶不上船舶巨大化的发展,引水人于狭窄水域操船实需航仪辅助。
电子海图,由于者操作设定者时有发生错误,以致显示之相对位置成为引航员不敢信任的工具。很多大型船舶,当船安全靠岸后,检视电子海图,常可发现船舶边线在码头边线以内,误差严重者可达1/2船宽。
依照笔者超过十年之引航经验,艏艉盲距极大船舶回转时,位于艏艉船副目视所报之最近目标距离,常会有极大误差,不足依赖。
50年前的雷达即有可变距离圈(Variable Range Marker;VRM)之设置,这二个距离圈可以分别设定为:VRM.1=驾驶台至船艏距离,VRM.2=驾驶台至船艉距离,于船舶回转时即可完全由雷达幕上察觉回转范围内是否有触及障碍物之危险。
另外,现代雷达已经都有vector之显示,因为港内狭水域船舶回转时船速都已极为缓慢,所以可请船副将True Vector设定为6分钟。由此Vector的箭矢方向,即可完全看出船舶有无进速或者退速。(请参考图一)。
箭矢方向朝向船艏,表示船有进速,反之箭矢方向朝向船艉表示船已有退速,朝向正横表示船仅有横移已无进速。因此True Vector箭矢虚线,也是狭窄港内水域回转时,极好用的参考工具。
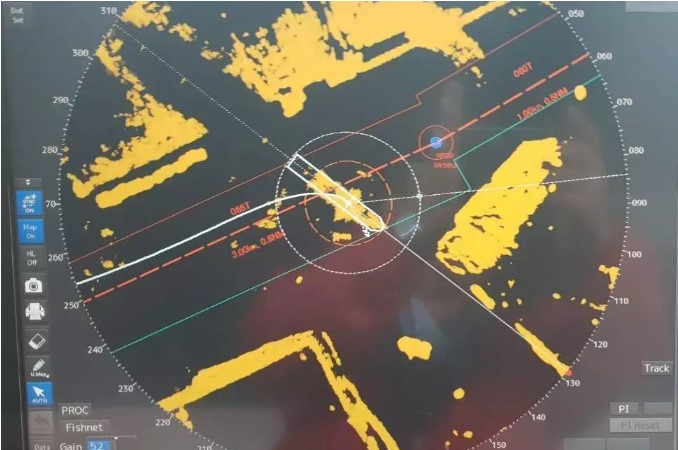
图一:Ship Contour、VRM1、VRM2、True Vector箭矢↑
任何一台GPS对于船速之显示都有与实际速度延迟之可能,例如船舶已从前进转成后退,常有GPS之船速显示仍为前进。而肉眼对于横向较近处固定目标之相对速度通常远较GPS敏锐。
船舶长度超过300米的大型货柜船,其雷达皆设有Ship Contour(轮廓;也有雷达说明书称其为Ship Symbol)。(详参图二), 很多雷达要将Range之设定缩小到0.75浬时,才会显现。
Ship Contour一般皆为造船或安装雷达时,由Maker依照驾驶台与艏艉之实际长、船宽,设定妥当,为了避免船员不小心更改成错误尺吋,一般船上船员因为没有密码,是无法更改其设定的。
因此,理论上来说,此Ship Contour的尺码是不应有误的。可是理论归理论,实际是实际,常常可遇有船的雷达Ship Contour发生严重设定误差。
但是很不幸的,截至目前,国际公约对于船舶雷达Ship Contour之设置、误差精准度,因为法规修改之落后,并未有详细规定以及检查要求。
此一IMO公约之改善,相信吾人各航海协会可以积极推动,以增进航行操作之风险降低。

图二:雷达频幕上之船型图标(Ship Contour)↑
雷达VRM以及Ship Contour疏忽资料设定产生巨大误差之范例:
图二中那条船雷达屏显示的Ship Contour,驾驶台位置较实际上前推了将近200米,详见图三。

图三:雷达屏幕有设定错误范例↑
领航员如果采信那个白色的Ship Contour,就会认为船艉离航道边缘上有进150米之余裕空间,向右原地回转应是完全安全的,但因为设定错误,将可能肇致严重事故。
图二这条船的致命设定有二个:
1. Ship Contour,驾驶台位置较实际上前推了将近200米
2. VRM.1、VRM.2船上也依据错误的Ship Contour驾驶台位置为中心而前推了将近200米。
这二个错误,完全足以导致船舶长度330米大货柜船在可用回转直径仅400米处回转之事故意外。
在本文图一中,该船总长369米,驾驶台至艏/艉分别为133米/ 236米。
可是当值船副却将驾驶台至船艏距离误设为142米,在船艏方向产生了9米之误差。
此种船员掉以轻心之错误设定可谓屡见不鲜,引水人不可不小心细查。
对于雷达VRM以及Ship Contour有无大误差之检视:
1.领航员登船后,可将雷达Range缩小至0.5甚至是0.25浬,适度调整Gain以及Sea Clutter钮,在显示屏上,本船雷达扫描中心即可出现一个看似台风眼的影像,此即可用以检视雷达扫描中心是否置于Ship Contour之驾驶台位置。
2.将雷达屏幕显示中心与附近岸标比对,即可察觉Ship Contour以及VRM中心有无设定错误。
3.依照驾驶台至首尾真实距离为Range,切实设定雷达VRM.1、VRM.2,可以检视Ship Contour之虚拟本船尺寸是否正确。
由于一般雷达VRM之单位仍为海浬, 而船舶之驾驶台至船艏/船艉的距离,是以公尺注记,如果引水人事先做个 公尺/浬 的换算表,随身带着,使用时就不必再用计算机慢慢算了。
引航员要如何避免此因为船方供给设备之设定错误遗憾而发生遗憾之事故,仅有自己千万不可大意放松。
例如可以早在登船前,即用VHF详细通知船上人员,使其有充裕时间将雷达VRM.1、VRM.2依照实际艏/艉距离设定妥当。
引水人登船后再依上述方式对于类达显示认真检查,如发现有错误设定,可及早要求船长予以修正。
结论:
随着船舶极快速的巨大化,及大型货柜船盲距巨大、视线不良,肉眼感测真实距离、船舶速度感,皆会随所在位置、当前能见度、目标亮度而产生不同误差。因此,对于巨大型货柜船在狭窄水域操船,须随着现实情况改变,以降低操作失误风险。
在船舶巨大化之同时,航行仪器亦快速进步日益精准,雷达可变距离圈(VRM.1 VRM.2)之设置、Ship Contour(船身轮廓)、True Vector(真实矢量)显示、、、,皆可以成为引水人于操纵船舶极有帮助的辅助性利器。
但是,无论如何,对于没有慎重调校之航仪或者设备,过度依赖(Over Reliance)将可能产生严重之操船意外。
引水人对于操船时拟采用之航仪设备一定要细心检视有无不当设定及误差。
